この節の作者: 清水康行 <yasu@i-ric.org>
2次元移流方程式¶
基礎式¶
2次元移流方程式を次式で表します.
ここで, \(t\) は時間, \(x, y\) は直交座標軸, \(f\) は移流される変数, \(u,v\) は \(x, y\) 方向の移流速度です.
1次元の移流方程式と同様,この方程式の理論解は \(f\) はその分布形を保ったまま, \(x\) 方向には \(u\) の速度で, \(y\) 方向には \(v\) の速度で移動 するという結果となります.
風上差分¶
移流項の風上差分式は下記となります.
ここで, \(\Delta x, \Delta y, \Delta t\) はそれぞれ \(x, y, t\) 方向の計算刻み幅で, \((i,j)\) はそれぞれ \((x,y)\) 方向の格子番号です. したがって, 例えば, \(u>0, \; v>0\) の場合, (123) 式の 差分式は下記のようになります.
ただし, \(f_n(i,j)\) は \(t=t+\Delta t\) における \(f(i,j)\) の値です. (126) 式より \(f_n(i,j)\) は次式を:math:Delta t 毎に 繰り返し計算することにより求めることが出来ます. なお,この場合は \(x\) 方向にも \(y\) 方向にも後進差分ということになります.
後進差分による計算例¶
\(u>0, \; v>0\) の場合の計算例を示します.\(f\) の初期分布は Figure 38 図に示すような 円錐形の分布を与えます.
Figure 38 : 2次元移流計算の初期条件¶
ちなみに,円錐形分布は次式で与えます.
ただし,
また,\(X_p, Y_p\) ピークの位置, \(f_p\) はピークの値, \(R\) は底面の半径です.
Pythonコードと計算例¶
(127) を使ったPythonコードを https://github.com/YasuShimizu/Python-Code/blob/main/2d_backward_p3d.py に示します.また,このコードを用いて計算された計算結果を下図に示します. なお,この例では \(u=v=0.5\) (m/s), \(f_p=0.5, R=20\) (m)としてます.
Figure 39 : 2次元移流方程式の計算結果(後進差分)¶
1次元の時と同様,この計算結果は数値拡散の影響でピークの値が徐々に下がりながら,円錐の形も 潰れながら移動していおり,けっして正確な計算結果とは言えません.
移流方向が変化する場合の風上差分法¶
(124) 式, (125) 式の移流項を一つの式で表した,\(f\) の更新 式は下記となります.
(130) 式は \(u, v\) の大きさや符号に関わらず適用可能な風上差分法です.
では,この2次元風上差分法を \(u, v\) が変化する状況で試してみましょう. いま,\(u,v\) が次式で 振動する状況を想定します.
この式で表される運動は円運動で, \(r_t\) は円運動の曲率半径, \(\omega\) は角速度, \(\theta\) は位相角です. もし, Figure 38 図に示した円錐形のピークが,(131) 式に従って運動するとした場合の結果は下図( Figure 40 )のようになります. なお, この例では, \(T\) を円運動の1周の周期として \(T=\) 100sec, \(r_t\) = 30m, f_p =0.5 とした計算です. また,\(T\) と \(\omega\) の関係は次式で表されます.
Figure 40 : 円錐形状の円運動¶
Figure 40 は単に円錐形の分布を (131) 式の速度で 動かしただけで,(123) 式の差分計算結果ではありませんが,ある意味これが これから行う数値計算の目標となる厳密解です. なお参考までに,Figure 40 図のアニメーションを 作成するPythonコードを下記に示します.
https://github.com/YasuShimizu/Python-Code/blob/main/3dcone_circle_m3d.py
前置きが長くなってしまいましたが,本節の目標である2次元移流方程式の風上差分解法を やってみましょう.
Pythonコードと計算例¶
(123) 式を用いたPythonコードを下記に示します.
https://github.com/YasuShimizu/Python-Code/blob/main/2d_upwind_circle.py
このコードを使って,(128) 式の初期条件で, \(u,v\) を (131) 式 で変化させながら計算した結果は下図となります.
Figure 41 : 2次元風上差分法による円錐形分布の円運動の計算¶
予想どおりではありますが,風上差分法で初期形状が徐々に拡散し,ピークの値も減衰してしまってます. 計算結果は安定していますが,1次元の時と同様,風上差分法では正確な計算結果が得られないことが示されました.
演習問題(4)¶
初期条件を円錐形分布とする変数 \(f\) が四角形の形状の辺に沿って連続的に移動する場合の \(f\) の時間変化を計算して下さい. |
高精度の差分法¶
ここで,1次元の場合と同様に2次元の高精度差分法として2次元版のCIP法について述べます.
2次元CIP法による移流項の計算( \(u<0, v<0\) の場合)¶
説明は簡単のためにまず \(u<0\) , \(v<0\) の場合について行います.
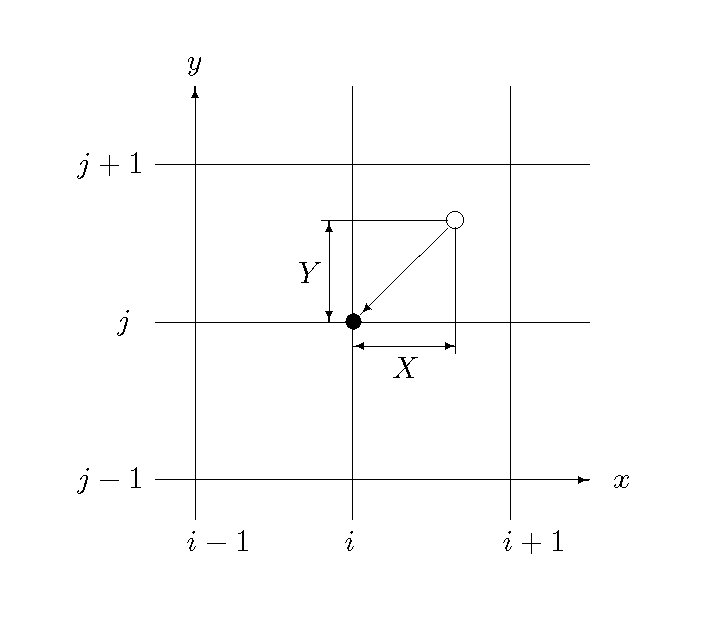
Figure 42 : 計算平面上での \(f\) の推定¶
Figure 42 示すように \(x, y\) 方向の計算点番号を \(i,j\) として 時刻 \(t\) で \(i, i+1, j, j+1\) の範囲にある点(図中の白丸)が \(\Delta t\) 時間で図中の黒丸の点に移動すると考えます.
1次元の計算で説明したのとまったく同じようにこの問題は Figure 42 の 黒丸の点における \(f\) の分布形をいかに推定するかという問題に帰着します. 即ち,
のときこの分布形 \(F(X,Y)\) が推定できれば
により \(f\) の時間更新ができます. ここで, \(f\) は \((i,j)\) 格子の離散値, \(F\) は連続関数であることに注意して下さい.
\(F\) の関数形は1次元問題のときは3次曲線としましたが, ここでは3次曲面とします. \(F(X,Y)\) は \(X=0, Y=0\) で
(ただし, \(F_x(X,Y)=\displaystyle{{\partial F}\over{\partial x}}\) , \(F_y(X,Y)=\displaystyle{{\partial F}\over{\partial y}} (X,Y)\) , \(f_x(i,j)=\displaystyle{{\partial f}\over{\partial x}} (i,j)\) , \(f_y(i,j)=\displaystyle{{\partial f}\over{\partial y}} (i,j)\) です.)
を満たす必要があるので, \(F(X,Y)\) を次式のように置きます.
この式は (135) 式を自動的に満たしています. 他の条件としては,
などを満たす必要があります. これらの関係を用いることにより, (136) 式中の係数は以下の ようになります.
演習問題(5)¶
(138) 式の誘導を自分で行って, \(a_1 \sim g_1\) の表現が正しいかどうか確かめて下さい. |
2次元CIP法による移流項の計算(一般化)¶
ここまでの説明は \(u<0\) , \(v<0\) の場合でしたが, 実際には \(u, v\) の符号の組み合わせに よって8通りの組み合わせがありますが, これをすべて定式化してプログラミング するのは非常に煩雑です. そこで1次元でやったように符号関数( \(\mbox{sign}\) )関数を導入して 表現することにします.
格子間の変数の分布形状 \(F(X,Y)\) は \(X, Y\) を Figure 43 のように定義し, (30) 式を2次元に拡張することにより, (140) のように定義します.
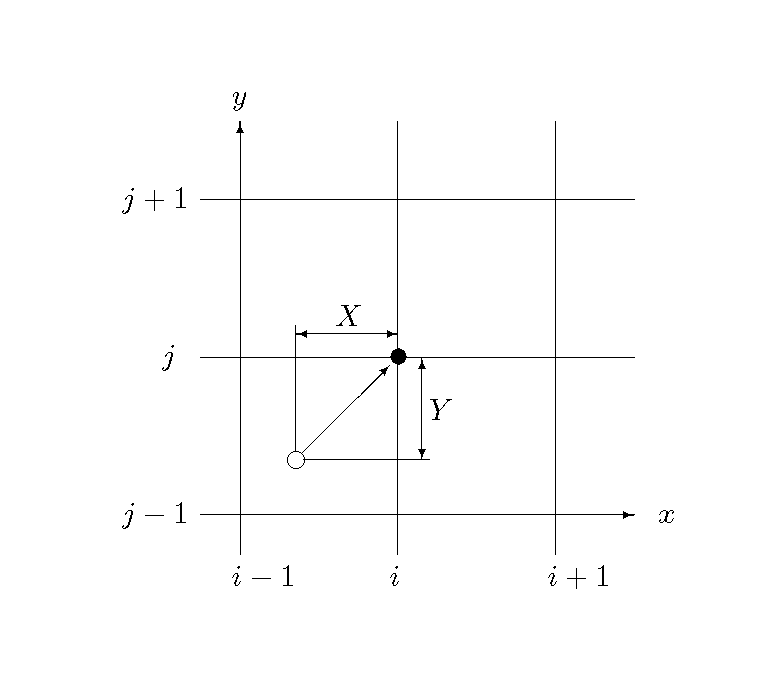
Figure 43 : 計算平面上での \(X, Y\) の定義¶
ただし, 係数 \(a_1 \sim g_1\) は \(i_s, j_s, i_m, j_m\) を用いることにより, \(u, v\) の符号に関係なく以下のように表現されます.
演習問題(6)¶
(141) 式の誘導を自分で行って, \(a_1 \sim g_1\) の表現が正しいかどうか確かめて下さい. |
微分量の更新¶
CIP法では変数 \(f\) の他にもその微分量 \(f_x, f_y\) も時々刻々更新して行く必要 があります. そこで (123) 式の両辺をまず \(x\) で偏微分します.
\(\displaystyle{{{\partial f}\over{\partial x}}}\) を \(f_x\) とすると,
となりまして, 左辺は :f_x に関する2次元の移流方程式になっていることが分かります. 従って, 前述の2次元のCIP法をそのまま適用すれば良いことに なります. また, 右辺に関してはもし \(u, v\) が定数であればゼロとなりますが, 変数の場合には, 1次元のCIP法で説明した[ CIP法 の基本概念 ]を適用して 分離解法で計算することになります. なお右辺の差分形式は中央差分で行けます.
同様に, (123) 式を \(y\) で偏微分して \(\displaystyle{{{\partial f}\over{\partial y}}}\) を \(f_y\) とすると,
が得られ (143) 式と同様な形となり, 左辺の移流項の部分はCIP法で, 右辺の Source項の部分は中央差分で計算可能となります.
Pythonコードと計算例¶
以上で述べた2次元CIP法のPhthonコードを下記に示します.
https://github.com/YasuShimizu/2d_advection_cip
このコードによる計算結果を下記に示します.計算条件は前記の 風上差分 と同じく円運動をする円錐形分布です.
Figure 44 : 2次元移流方程式の計算結果(CIP法)¶
計算結果によれば,円錐形の形状はほとんど形を保ったまま円運動を続け,2次元の場合もCIP法は移流方程式の数値計算法として 高精度の計算結果が得られることが分かります.